自动驾驶仪部分
图片由比尔哈里斯
现代自动飞行控制系统的核心是一个电脑与几个高速处理器。收集所需的智能控制飞机,处理器和传感器位于主要控制表面。他们还可以从其他飞机系统收集数据和设备,包括陀螺仪、加速计、测高计,指南针和速度指标。
亚足联的处理器然后输入数据,使用复杂的计算,比较一组控制模式。控制方式是一种设置输入的飞行员定义了一个特定的飞行细节。例如,有一个控制模式,定义了如何保持飞机的高度。18新利最新登入也有控制模式,保持速度,航向和飞行路径。
广告
这些计算确定飞机是否服从命令设置在控制模式。处理器然后发送信号不同伺服机构单位。伺服机构,简称伺服是一个设备,提供机械控制距离。存在一个伺服系统中每一个控制面包括自动驾驶仪系统。伺服系统以计算机的指令和使用汽车或液压飞船的控制面,确保飞机保持适当的课程和态度。
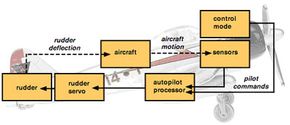
上面的例子展示了如何自动驾驶系统的基本要素是相关18新利最新登入的。为了简单起见,只显示一个控制面——方向舵,尽管每个控制表面会有一个类似的安排。18新利最新登入注意,一个自动驾驶仪看起来就像一个循环的基本原理,传感器将数据发送到自动驾驶计算机,处理信息和传送信号的伺服,移动控制表面,从而改变飞机的态度,创建一个新的数据集的传感器,又开始整个过程。18luck手机登录这种类型的反馈回路是自动驾驶仪的操作系统的核心。这件事太重要了,我们要检查下一节反馈循环是如何工作的。18新利最新登入