毫无疑问,HowStuffWorks的工作18新利最新登入人员对即将上映的《变形金刚》电影感到焦虑。我们不只是想知道它是否会好。我们想知道在我们的有生之年,我们是否会看到拥有变形金刚能力的机器人。虽然全尺寸变形金刚看起来有点难以置信——而且不切实际——但事实证明,一些现有的变形金刚机器人和变形金刚有很多相似之处。在这篇文章中,我们将探索这些变形机器人的样子,它们是如何工作的,以及它们与擎天柱等变形金刚有什么相似之处。18新利最新登入
我们先来分析一下擎天柱本人。他身材高大,令人印象深刻,但他真的存在吗?为了找到答案,我们询问了工程师迈克尔·d·贝洛特(Michael D. Belote),如何才能制造一辆全尺寸的拖拉机拖车,并将其改装成两足机器人。换句话说,要做一个真人大小的擎天柱需要什么?
广告
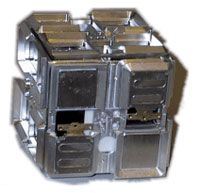
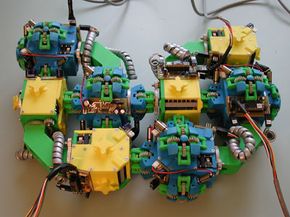
首先,质数必须是aself-reconfiguring机器人.现在已经有一些可以自我重组的机器人,或者可以改变形状来执行不同任务的机器人。18新利最新登入然而,他们与擎天柱非常不同。Belote解释道:
即使工程师们想出了如何在擎天柱的规模上制造可互换的18新利最新登入模块,可能仍然不可能提供移动它们的动力。擎天柱的车辆形态可以使用普通柴油。但是走路远不如用轮子滚动有效。为了行走,Prime需要比柴油发动机提供更多的动力。以下是Belote对如何处理Prime的功率需求的分析:18新利最新登入
因此,液压动力可能会让“擎天”行走,但液压系统本身会产生一系列不同的问题。Belote说:“必须增加一个油箱或储液器来保存液压油,液压泵是必要的;必须使用二次电源为泵供电;阀门是必要的,以满足适当的压力和流量。”此外,液压驱动的Prime必须内衬管道以输送液压油。在改造过程中,这些管道,以及Prime的燃料管道和电线,必须保持完好无损,甚至不受影响。
在成功转化为机器人之后,擎天柱将不得不像两足动物一样行走。Belote描述了实现这一目标的条件:由于传统半挂车的重量通常超过30吨,Prime的最终重量很可能在35至40吨之间。将其与世界上最好的“行走”机器人——本田(Honda)相比阿西莫机器人它的总重量为119磅,但只能行走约40分钟(电动),最大速度不到每小时2英里。ASIMO的重量比是每英寸2.3磅,而Prime的重量比可能会超过每英寸75到80磅,增加了30倍。
此外,机器人不能轻易模仿行走的动作。“对于机器人,”Belote解释说,“有一个直接的命令(抬起腿'x'的量,前倾'y'的量,下伸腿'z'的量,等等)。然而,对于人类来说,没有“18新利最新登入反馈”机制——你的大脑不会不断地告诉你的腿该放在哪里。相反,你只需身体前倾,然后‘摔倒’,当你的脚接触到地板时,你的腿就会吸收冲击力。”
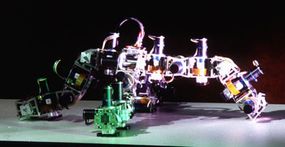
所以,在我们有生之年,我们不太可能看到一个工作的擎天柱或像他那样的机器人。但是可以改变形状或变成任何形状的机器人已经存在。我们将在下一节中讨论其中的一些,以及它们与Prime的比较。18新利最新登入
广告