想要一个机器人为你做饭、做作业、打扫房间或拿杂货吗?机器人已经做了很多我们人类不想做,不能做,或者根本不能像我们的机器人同伴那样做的工作。在世界各地的工厂里,没有实体的机械臂组装汽车,把糖果小心翼翼地放进盒子里,做各种乏味的工作。市场上甚至有少数机器人的唯一工作就是用吸尘器吸地板或者修剪草坪。
广告
我们很多人都是看着电视和电影里的机器人长大的罗西《杰森一家》(Jetsons)的机器人管家;数据《星际迷航:下一代》(Star Trek: the Next Generation)中的机器人机组人员;当然,C3PO,来自《星球大战》。如今被创造出来的机器人并不完全属于数据或C3PO领域,但它们的技术已经取得了一些惊人的进步。本田的工程师们一直在忙着创造阿西莫机器人的用途20年.在本文中,我们将了解是什么使ASIMO成为迄今为止最先进的类人机器人。
本田汽车公司开发了ASIMO, ASIMO代表创新移动性的先进一步,是世界上最先进的类人机器人。根据ASIMO的网站,ASIMO是世界上第一个可以独立行走而且爬楼梯.
除了ASIMO能像我们一样走路外,它还能理解预先编程的手势和口头命令,识别声音和面孔而且与IC通信卡接口.ASIMO有手臂和手,所以它可以做一些事情,比如开灯开关、开门、搬运物品和推车。
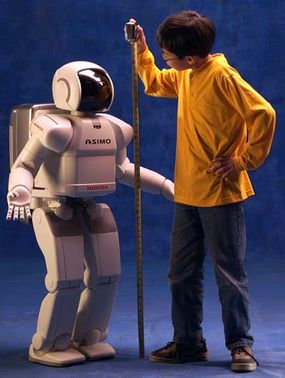
而不是制造一个机器人将是另一个玩具,本田想创造一个机器人将是一个助手对于人类来说,机器人可以在家里帮忙,帮助老人,或者帮助那些被困在轮椅或床上的人。ASIMO高4英尺3英寸(1.3米),这个高度正好可以和坐在椅子上的人对视。这使得ASIMO可以在不太庞大和具有威胁性的情况下完成创建时的工作。通常被称为看起来像一个“穿着衣服的孩子”宇航服ASIMO友好的外观和不具威胁性的尺寸很好地满足了本田在创造它时的目标。
ASIMO也可以做这样的工作危险的对人类来说,比如进入危险地区,拆除炸弹,或灭火。
广告